Environment
Base environments
SMARTS environment module is defined in env package. Currently SMARTS provides two kinds of training
environments, namely:
HiWayEnvV1utilizing agymnasium.EnvinterfaceRLlibHiwayEnvcustomized for RLlib training
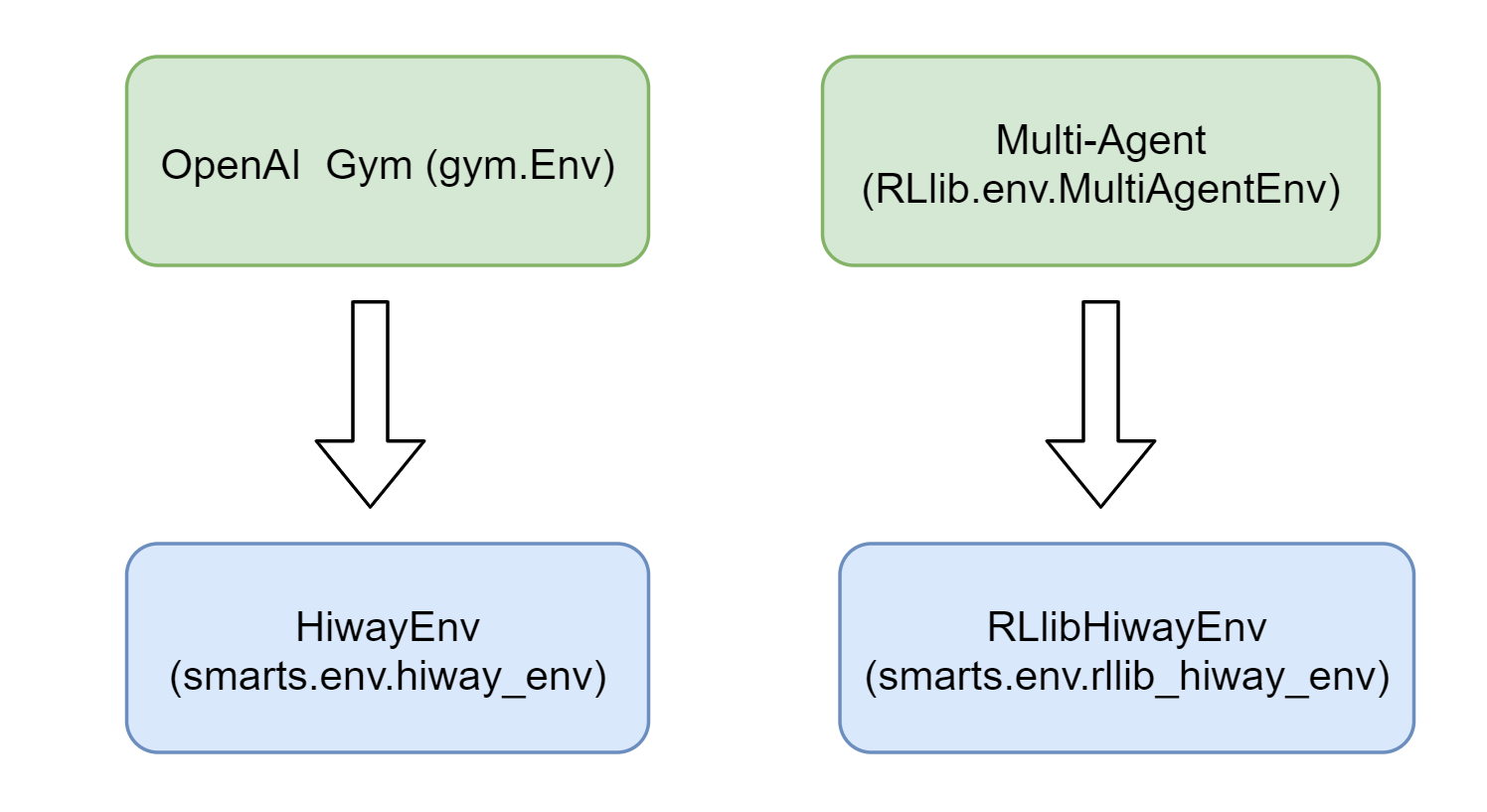
HiWayEnvV1
HiWayEnvV1 inherits class gymnasium.Env and supports gym APIs like reset, step, close. An usage example is shown below.
This version has two configurations of observation output: ObservationOptions.full which provides padded agents in the observations which
exactly matches the env.observation_space, and ObservationOptions.multi_agent which provides only agents as are currently active. Refer to
HiWayEnvV1 for more details.
import gymnasium as gym
# Make env
env = gym.make(
"smarts.env:hiway-v1", # Env entry name.
scenarios=[scenario_path], # List of paths to scenario folders.
agent_interfaces={AGENT_ID: agent_spec.interface}, # Dictionary mapping agents to agent interfaces.
headless=False, # False to enable Envision visualization of the environment.
seed=42, # RNG seed. Seeds are set at the start of simulation, and never automatically re-seeded.
observation_options=ObservationOptions.multi_agent, # Configures between padded and un-padded agents in observations.
)
# Reset env and build agent.
## `reset(options) forwards "scenario" and "start_time" to `smarts.reset()`
observations, infos = env.reset()
agent = agent_spec.build_agent()
# Step env.
agent_obs = observations[AGENT_ID]
agent_action = agent.act(agent_obs)
observations, rewards, terminated, truncated, infos = env.step({AGENT_ID: agent_action})
# Close env.
env.close()
RLlibHiwayEnv
RLlibHiwayEnv inherits class MultiAgentEnv, which is defined in RLlib. It also supports common environment APIs like reset,
step, close. An usage example is shown below. Refer to RLlibHiWayEnv for more details.
from smarts.env.rllib_hiway_env import RLlibHiWayEnv
env = RLlibHiWayEnv(
config={
"scenarios": [scenario_path], # List of paths to scenario folders.
"agent_specs": {AGENT_ID: agent_spec}, # Dictionary mapping agents to agent specs.
"headless": False, # False to enable Envision visualization of the environment.
"seed": 42, # RNG seed. Seeds are set at the start of simulation, and never automatically re-seeded.
}
)
# Reset env and build agent.
observations = env.reset()
agent = agent_spec.build_agent()
# Step env.
agent_obs = observations[AGENT_ID]
agent_action = agent.act(agent_obs)
observations, rewards, dones, infos = env.step({AGENT_ID: agent_action})
# Close env.
env.close()
Features
Vehicle Diversity
SMARTS environments support the following types of vehicles:
ego agents - controlled by RL policy currently in training.
social agents - controlled by (pre-trained) policies from the Agent Zoo (see
policies). Like ego agents, social agents also useAgentSpecto register with the environment. They interact by watching the observation and returning action messages. Compared to ego agents, social agents are driven by trained models, hence they can provide behavioral characteristics we want.traffic vehicles - controlled by an underlying traffic engine, like
SUMOorSMARTS.dataset vehicles - controlled by replay of traffic history from naturalistic datasets such as Argoverse, NGSIM, and Waymo.
Refer to Scenario Studio for designing scenarios, traffic vehicles, social agents, ego agents, and maps.
Multi-agent Scenario
In multi-agent scenarios, the agents may start and end at different time points
in the simulation. Consider the following multi-agent scenario with 3 agents,
namely Agent_0, Agent_1, and Agent_2.
Time (s) |
0 - 10 |
11 - 20 |
21 - 30 |
31 - 40 |
|---|---|---|---|---|
Active agents |
Agent_1, Agent_2 |
Agent_1 |
None |
Agent_0 |
Observation.keys() |
Agent_1, Agent_2 |
Agent_1 |
None |
Agent_0 |
Here, Agent_1 and Agent_2 start at time 0s, whereas Agent_0 starts
at time 31s. Agent_2, Agent_1, and Agent_0 become done at time 10s,
20s, and 40s, respectively. There could also be periods of time when there are
no active agents such as between time 21s and time 30s. For time 21s to 30s,
SMARTS simply returns an empty dictionary as observation and the environment
has not finished yet because Agent_0 is yet to become done.
Scenario Iterator
If (i) a list of scenarios, or (ii) a folder containing multiple scenarios, is passed through the environment arguments, then SMARTS automatically iterates over those scenarios. The next scenario is loaded after each env.reset() call. This feature is especially useful for training on multiple maps.
Moreover, if there are n routes file in scenario1/build/traffic dir, then each routes file will be combined with the map to form a scenario, leading to a total of n concrete scenarios (i.e., traffic-map combination) that SMARTS automatically iterates through for scenario1. See Scenario for implementation details.
tune_config = {
"env": RLlibHiwayEnv,
"env_config": {
"seed": tune.randint(1000),
"scenarios": [scenario1, scenario2, ...],
"headless": args.headless,
"agent_specs": agent_specs,
},
...
}
In contrast to the above case, we can also use multiple maps for different workers in RLlib as follows.
tracks_dir = [scenario1, scenario2, ...]
class MultiEnv(RLlibHiWayEnv):
def __init__(self, env_config):
env_config["sumo_scenarios"] = [tracks_dir[(env_config.worker_index - 1)]]
super(MultiEnv, self).__init__(config=env_config)
tune_config = {
"env": MultiEnv,
"env_config": {
"seed": tune.randint(1000),
"scenarios": tracks_dir,
"headless": args.headless,
"agent_specs": agent_specs,
},
...
}
Note
The above two cases of scenario iteration are different. In the first case, samples are collected from different scenarios across time, but in the second case different workers collect samples from different scenarios simultaneously thanks to distributed computing of multiple workers. This means that in the first case, the agents get experiences from the same scenario, whereas in the second case, the agents get a mixture of experiences from different scenarios.
Determinism
SMARTS simulation is deterministic. Assuming all ego and social agents produce deterministic action, then the entire simulation will play back deterministically when repeated.